RC Servo
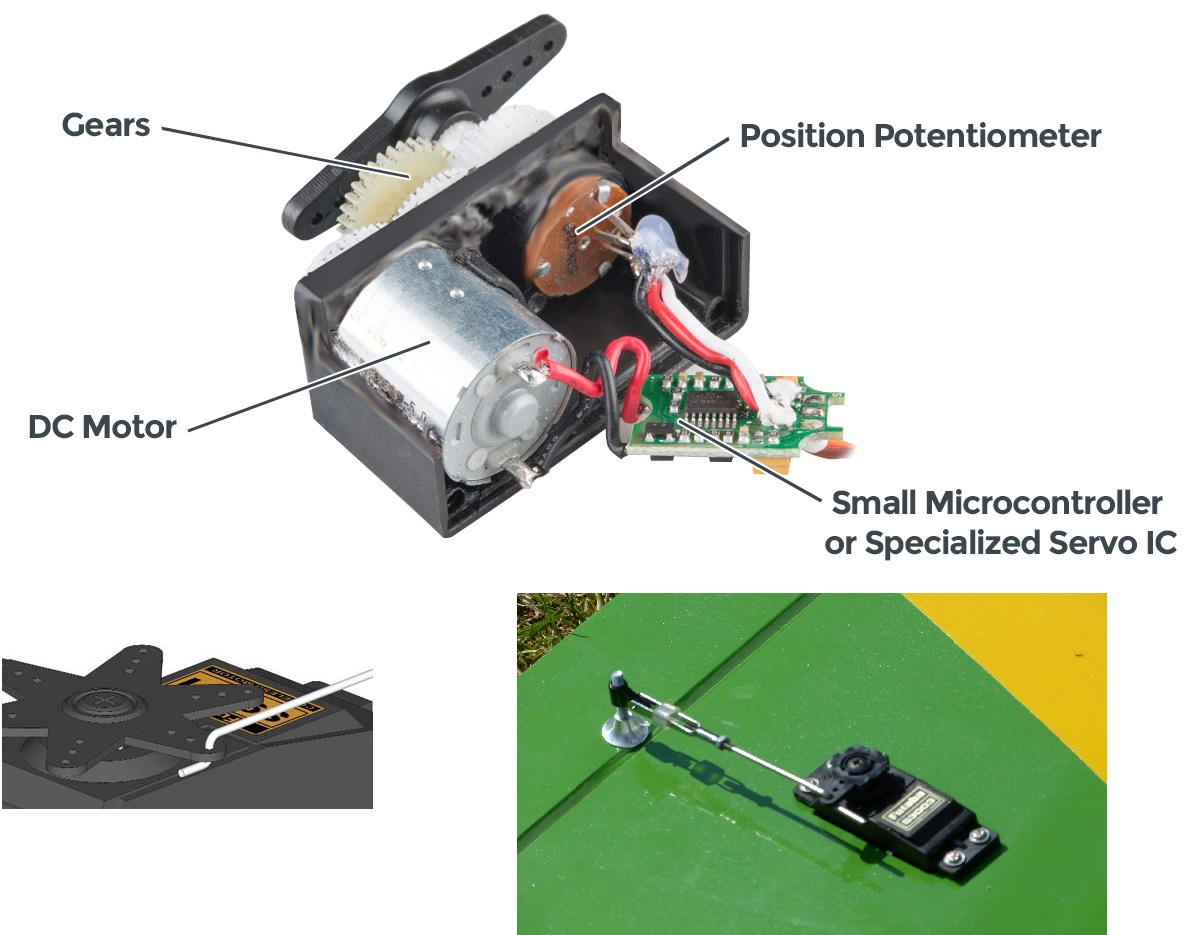
A servo motor is a generic term for a motor that has an integrated driver and controller. Servos are used in all kinds of motion control. An RC servo is a small motor used in remote control cars, planes and boats, and is easy to control using a microcontroller. The Teensy can command the RC servo to move to any angle from 0 to 180 degrees, and the servo will hold that angle as best as it can. Servos come in many sizes and qualities, and are often highly geared to have lots of torque. The downside of the gears is audible noise when moving. Most servos use a potentiometer as a position sensor, and this limits their motion to 180 degrees. The output shaft of the servo attaches to a part called the servo horn, which can be tricky to attach to. Try not to glue directly to it (the plastic is too inert for anything to stick well), instead use a stiff wire as a pushrod.
 The RC servo
The RC servo
Wire up the RC servo, run the sweep example
The RC servo has 3 wires: brown for ground, red for 5V, and orange for signal. You can find 5V from the ItsyBitsy on pin USB. Some larger servos can use more current than the USB cable can provide, and would need an external power source from a wall adapter or a battery pack. The kit contains a set of 3 extra long header pins so you can plug the servo into the breadboard.
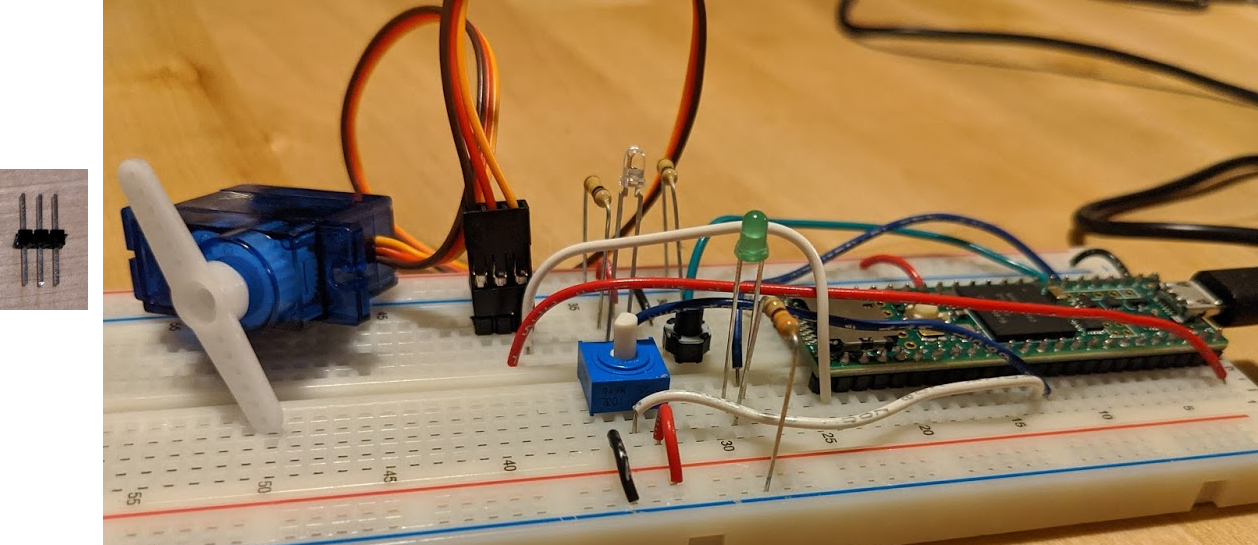 How to plug the RC servo into the breadboard
How to plug the RC servo into the breadboard
The servo is commanded using the PWM, like how pulseio pins work.
To use the servo variable type, you need to add a library to the ItsyBitsy. Download the 4.0 bundle of Adafruit code from https://github.com/adafruit/Adafruit_CircuitPython_Bundle/releases/download/20200704/adafruit-circuitpython-bundle-4.x-mpy-20200704.zip. Unzip the file, and copy the folder adafruit_motor into the lib folder on the CircuitPython drive.
You'll need the pulseio and servo libraries:
import pulseio
from adafruit_motor import servo
And you need to define a pulseio and servo object:
pwm = pulseio.PWMOut(board.D11, duty_cycle=2 ** 15, frequency=50)
my_servo = servo.Servo(pwm)
Make the servo motion mirror the potentiometer
Edit the code so that at 10Hz the potentiometer angle is read and sent to the servo, so that the servo angle matches the potentiometer angle.